
![]() ∥
∥ ![]() ∥ 中研院 ∥ 人社中心 ∥ 繁體中文 ∥ English
∥ 中研院 ∥ 人社中心 ∥ 繁體中文 ∥ English
專題題目:動態路徑規劃演算法與WebGIS系統開發實務
實習學生:楊研茂(國立臺灣海洋大學資訊工程學系)
指導老師:郭巧玲 助研究員
郭巧玲老師指導實習學生楊研茂同學,研究圖形網路結構與路徑規劃演算法,運用NetworkX和OpenLayers開發出一可執行動態路徑規劃演算法之WebGIS系統,並以臺北市範圍為例。實作中將路網資料轉成圖形網絡,並設計了合適之最短路徑演算法,在圖形網絡中進行路徑走訪,最後繪製路徑顯示在地理資訊系統。
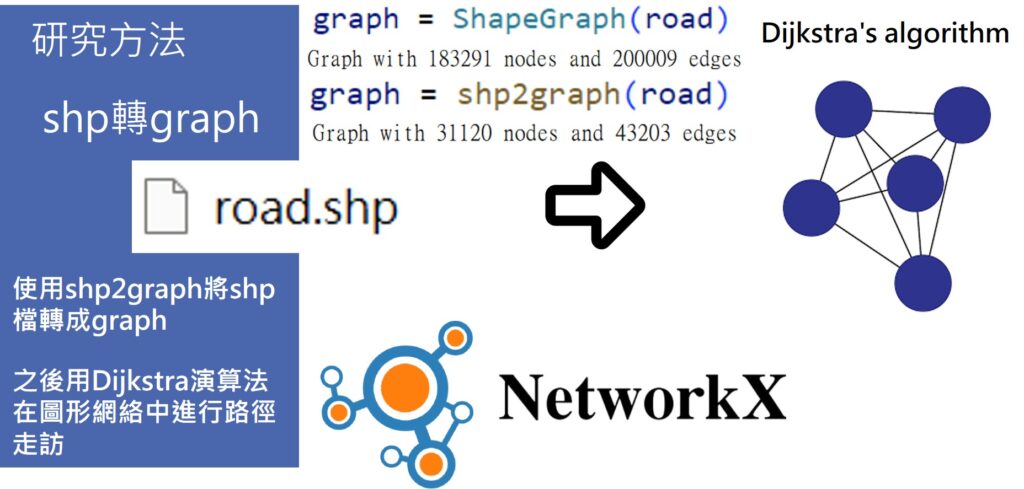
1.研究方法
a.Shapefile檔轉圖形網絡:利用shp2graph工具,將臺北市的路網資料(shp檔)轉成大型圖形網絡。
b.最短路徑演算法:採取Dijkstra演算法在圖形網絡中進行路徑走訪,Dijkstra演算法是一個從單一起點到其餘各個節點的最短路徑演算法,可解決有向圖最短路徑問題。
c.處理點落在路網外之情況: 若路徑規劃的起點終點落在路網以外,則透過近鄰分析找到離該點最近的道路。
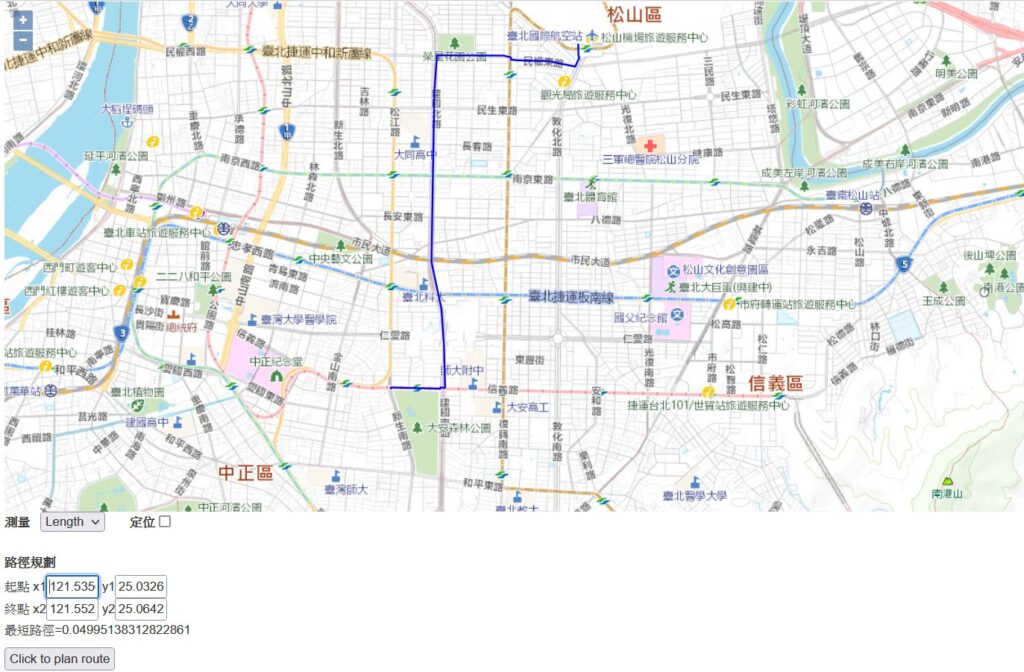
2.研究成果:路徑規劃功能
將起點和終點的經緯度坐標輸入,並點擊按鈕,最後產生藍色的最短路徑;以下為系統針對大安森林公園到捷運松山機場站路徑規劃結果。
3.其他功能
a.測量功能:點擊起點和終點產生黑色的直線,線段軌跡不會消失,黃色的框框會顯示距離數,也可以畫多邊形,顯示面積。
b.定位功能:點擊定位旁的框框,會彈出對話視窗,問使用者是否接受讓網站知道所在位置,點擊允許,定位到使用 者目前位置,並顯示淺藍色的點到現在位置。
c.顯示鼠標坐標功能:顯示滑鼠鼠標目前的經緯度,若鼠標的位置調整,坐標也會動態改變。